機械
機械とは、人間の力や自然の力を効率的に利用して、特定の目的を達成するために構造的に組み合わされた装置や構造体の総称である。現在、メカトロニクスを取り入れた電子機械を機械というのが一般的である。具体的には自動車、ボール盤、普通旋盤などから洗濯機や掃除機の家電、ロボットなどが対象となる。これらは、動力の発生・伝達・変換・制御・利用といった機能を持ち、産業、輸送、日常生活、医療などあらゆる分野で不可欠な存在となっている。
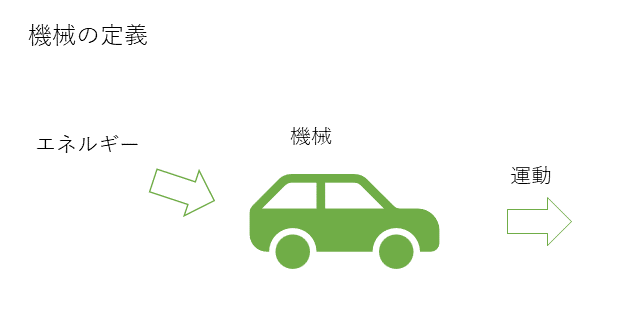
機械の定義
機械は、エネルギーの変換や物体の移動、加工、測定などを行うために設計された人工的なシステムである。大きくは「単純機械」と「複雑機械(複合機械)」に分類される。単純機械にはてこ、滑車、ねじ、斜面などがあり、複雑機械はこれらの原理を組み合わせた機構を持つ。自動車、航空機、家電製品、製造装置などが複雑機械に該当する。
機械とは、エネルギー・物質・情報を入力として受け入れ、これを内部で形を変えたり伝えたりして、最後に違った形のエネルギー・物質・情報を出力としてですものをいい、人に役立つ動きをするものである。
機械とは、外部から力が加わっても壊れない物体の組み合わせから構成されており、各部分は限られた一定の運動をしてエネルギーの供給を受けて有効な仕事をするものである。
歴史的背景
古代ギリシアやローマでは、アルキメデスやヴィトルヴィウスのような学者や建築家が、歯車や巻き上げ装置を「重いものを動かすための道具」として研究した経緯がある。特にヴィトルヴィウスは、建築の文脈でmachineの語源を論じながら、当時の技術的工夫を要する仕掛けを幅広く捉えていたとされる。一方、中国においても紀元前の文献に力学的な装置が登場するが、はっきりとした定義は見受けられない。19世紀に入るとドイツの機械学者レウロウ(Reuleaux)が「複数の部材が連動し、運動を生み出すもの」を機械と呼ぶ考えを提示し、動力が外部か内部かは問わないと述べた。これらの思想は産業革命を経て再整理され、やがて「動力伝達を軸に、特定の作業を行う仕組み」が機械と見なされるようになる。
機械の分類
機械は主に原動機、作業機械、測定機械、知能機械などに大分できる。原動機は水力、風力、内燃機関(エンジンなど)、外燃機関(蒸気機関など)などをいう。作業機械は、工作機械・化学機械などの生産機械やベルトコンベア、クレーンなどの運搬機械などをいう。測定機器は試験機、検査機、知能機械はコンピュータやロボットなどをいう。
様々な機械の例
| 切削機械 | MC、歯切盤、旋盤、研削盤 |
|---|---|
| 加工機械 | プレス、鋳鍛造、レーザ加工 |
| 精密機械 | 三次元測定機、マイクロマシン |
| 産業機械 | 油空圧、食品、熱処理、化学 |
| 電子・電機機器 | リニアモータ、ハードディスク |
| 交通機械 | 自動車、鉄道、船舶、航空機 |
| 各種装置・器具 | 金型、道具、全自動洗濯機 |
機械の構成
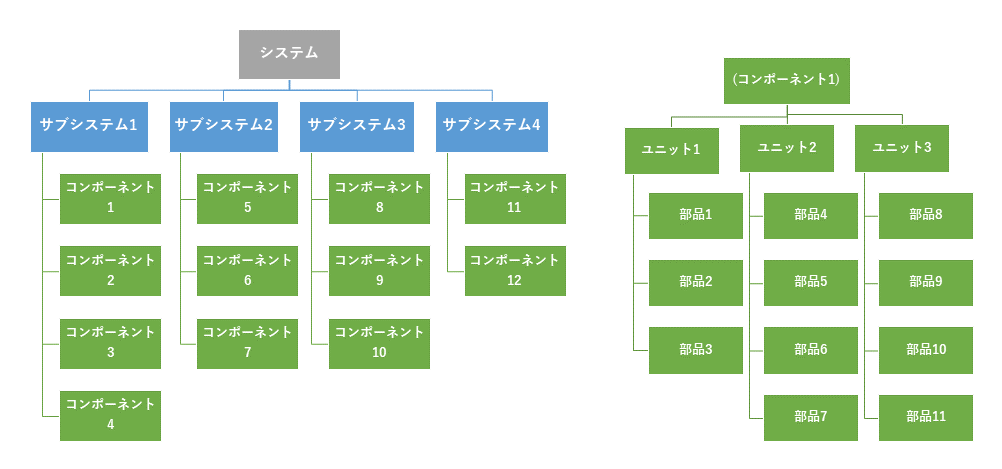
機械は一連のシステム(TOP ASSY)の中にいくつかのサブシステム(SUB ASSY)で構成される。そのサブシステム(SUB ASSY)は、さらにいくつかのコンポーネント(component)に分かれる。そのコンポーネントもいくつかのユニットに分かれて構成される。
基本構成要素
- 動力源(モーター、エンジンなど)
- 伝達装置(歯車、ベルト、シャフトなど)
- 制御機構(センサ、スイッチ、ソフトウェア)
- 作動機構(アクチュエータ、シリンダなど)
- 支持構造(フレーム、ハウジング)
動力の種類と機械の特徴
機械の動力源には、人力、動物力、風力、水力、蒸気、内燃機関、電気、油圧、空気圧など多様な形式がある。現代では、電気モーターや内燃エンジンが主流であり、用途に応じて適切な動力源が選択される。エネルギーの伝達効率や制御性、コスト、安全性などがその選定において重要な要素となる。
機械要素
機械を構成する部品を機械要素という。ねじやばねなどのように働き・形状・大きさが共通している。また機械要素のほか、モータや回路基板、スイッチ、センサなどが数多く使われている。
機構
機構とは、節や対偶により構成され、運動の形や速度を変えて伝達するために用いられる仕掛けである。この意味では機械とは機構の集合によって仕事をなすものといえる。
機構とは複数の抵抗性のある部材からなり、その一つを固定したとき、他がこれに対して限定的な運動をする部材の組み合わせである。
節
節(リンク)とは機構を構成する物体である。歯車、ベルト、プーリ、クランク、スライダ、カムなどは、力を伝えたり運動を伝える節である。機構はこのような節が連結されてできた運動系で、機械には様々な機構により成立している。
機素
機素とは、互いに接触し一定の限定運動をする二つの部材である。
対偶
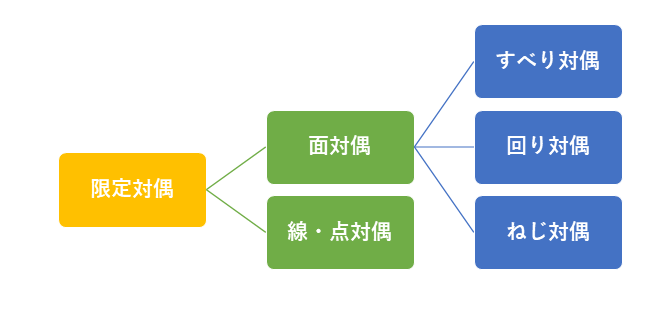
対偶(ペア)とは、節と節を接触させて決められた相対運動を行わせるために節の接触部分を必要な形にして組み合わせることをいう。対偶には、直線運動・回転運動・らせん運動を行わせる組み合わせた面対偶(進み対偶、回り対偶、ねじ対偶)がある。また、複雑な運動を可能とする線対偶がある。
運動
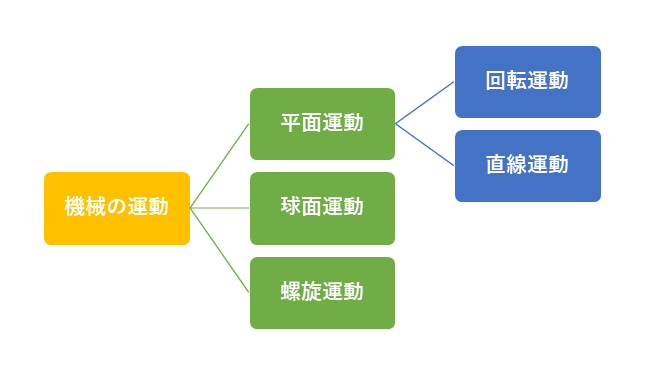
機械の運動は、回転運動、直線運動、球面運動、らせん運動の4つに分かれる。回転運動は軸を中心に運動し、直線運動は往復運動をとる。球面運動は遠心調速機のおもり、らせん運動はねじなどがあげられる。それぞれ機械要素や機構により実現される。
制御
制御にはシーケンス制御、フィードバック制御などがある。
シーケンス制御
シーケンス制御とは、あらかじめ決められた順序や条件に従って、機械を制御する方式である。自動機械の制御に用いられる。
フィードバック制御
フィードバック制御とは、目標として決められた位置や速度などと現在の運動を比較して差が生じた場合に修正動作を行う方式である。
コメント(β版)