
フィードバック制御
フィードバック制御は、信号機やエレベータなどの制御のように、あらかじめ定められた順序に従って制御の各段階を随時進めていく制御で、フィードバックされた信号と目標となる信号とを比較しながら制御を行う。フィードバック制御は、制御系で制御される制御対象と制御装置とから成り立ち、制御対象の出力である制御量を目標値に一致させることを目的としている。
フィードバック制御
フィードバック制御の制御装置は、制御対象を除いた要素全体を指し、検出部、比較部、調節部、操作部からなる。
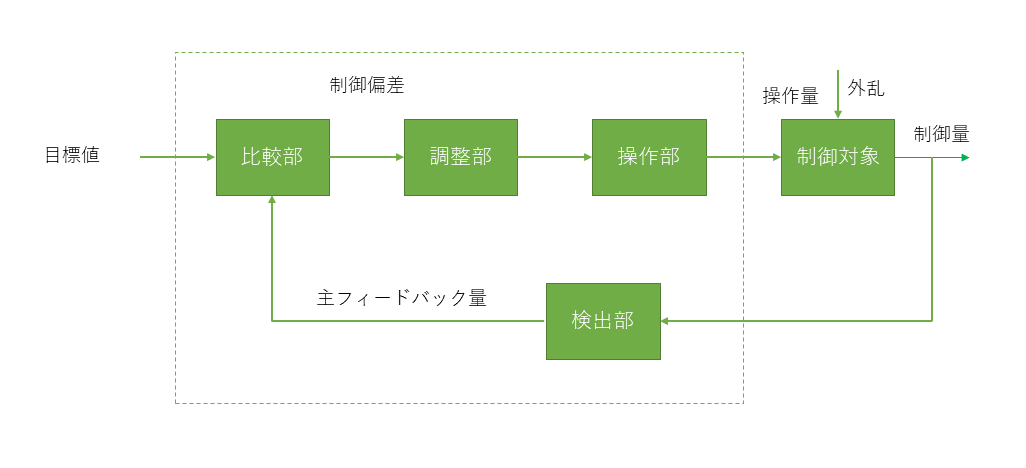
- 制御対象:制御の対象となる系で、機械、プロセス、プラントなどの全体または一部を示す。
- 比較部:目標値と制御量(または制御対象)からフィードバックされる信号とを比較する部分
- 検出部:制御量を目標値と比較するために主フィードバック量に変換する部分
- 調節部:目標値に基づく信号および検出部からの信号を基にして、制御系が所用の働きをするのに必要な信号を作り出して操作部へ送り出す部分
- 操作部:調節部などからの信号を操作量に変えて制御対象に働きかける部分
- 制御量:制御対象に属する量のうちで、それを制御することが目的となっている量
- 操作量:制御を行うために制御対象に加えられる量。操作量を変化させることにより制御量を調節する
- 外乱: 制御システムを乱そうとする外部要因
- 目標値: 制御システムとは無関係に外から設定される量で制御量と一致させるのが目的
- 主フィードバック量:制御量の値を目標値と比較するために、比較部へフィードバックされる量
- 制御偏差(制御動作信号,誤差):目標値と主フィードバック量の差
フィードバック制御が使われている装置
フィードバック制御の応用の制御として、自動調整、サーボ機構、プロセス制御、NC(数値制御)などがある。
コレだけで1mS単位でフィードバック制御できるスタンドアロンなNCコントローラー。LCNCと外部FPGA IO。
クラシックラダーでラダー図でのIO制御もDCモーターをサーボ制御もできる。LCNCのお陰で何でもアリ。 pic.twitter.com/1Xwe5koUEt— あきらひとし (@akirahitoshi) July 28, 2019
自動調整
自動調整とは、原動機や電動機の調速、電圧調整、周波数制御等に用いられる基本的な制御である。
サーボ機構
サーボ機構は、兵器の自動照準、航空機の自動操縦、工作機械のならい制御で使用される制御で位置と角度を制御対象としている。その他さまざまな産業で応用されている。例をあげれば、遠隔指示器,、X-Yレコーダー、自動旋盤、自動フライス盤、産業用ロボットのマニピュレータ、船舶・航空機のオートパイロット、プロセス用操作弁のポジショナーな等があげられる。
プロセス制御
プロセス制御は、化学プラントなどに原料、エネルギーを加え、圧力、温度、液面などをコントロールする制御である。定値制御やプログラム制御が用いられる。
NC(数値制御)
NC(数値制御)は工作機械に用いられる制御で、工作物に対して工具の位置をそれに対応する数値情報でコントロールする制御である.
NCの軸フィードバック制御迄ラズパイでイケるけど、、、、おいらも使えるんだったらラズパイよりN100(旧Atom系)つかうな
まぁi5なりi3なりの中古の方が安価でそっち使うとも思うが
— あきらひとし (@akirahitoshi) May 20, 2025
制御の分類
制御の分類は、制御動作による分類、制御系の構成による分類、入出力の線形性による分類、目標値の与えられ方による分類など多岐にわたる。
Roller485 + FIRE の倒立振子
current mode(黄色LED、左側動画) でも動かしてみた
ユニットの速度制御のゲインをP=2、I=0、D=600に変更したspeed mode (緑色 LED、右側動画)で動かした方が良さそう
どちらも車体・車輪の角度と角速度の状態フィードバックで指令値を決め、ゲインは手動調整 pic.twitter.com/aufCtRkNY4
— かーたー (@carter_control) August 18, 2025
制御動作による分類
- 連続制御:システムの制御動作が時間的に連続して行われる制御
- 不連続制御:サンプル値制御ともいい、システムの制御動作が時間的に不連続な制御
- オンオフ制御:システムの制御動作がオンかオフのように制御対象への操作量が不連続な値で入力される制御
- 比例動作(P動作):制御動作信号の現在値に比例する操作量を出す制御動作
- 積分動作(I動作):制御動作信号の積分値に比例する操作量を出す制御動作
- 微分動作(D動作):制御動作信号の微分値に比例する操作量を出す制御動作
- 複合動作:複数の制御動作を組み合わせた動作
制御系の構成による分類
- 一変数制御:制御量や操作量がそれぞれ1つしかない制御
- 多変数制御:制御量や操作量が2つ以上ある制御
- 複合制御:制御量間において、互いに干渉のない制御、あるいは干渉があっても、その方向が一方向の制御
- 結合制御:複数のフィードバック制御系を結合し、その両者に干渉がある制御系に対する制御
- カスケード制御:一つの制御装置の出力信号によって、他の制御装置の目標値を変化させて行う制御
- フィードフォワード制御:外乱が出力に影響を及ぼす前に、先に打ち消すような動作を行う制御
入出力の線形性による分類
- 線形制御:入力と出力との間に量的に直線的な比例関係のある制御。線形(原因と結果とで重ね合わせの性質)の特性をもった制御系
- 非線形制御:入力と出力の間に線形性が成り立たない制御系
目標値の与えられ方による分類
- 定値制御:目標値が一定で、外乱を受けた場合でも制御量を一定に保つように構成された制御系
- 追値制御:変化する制御量制御量に対して、常に目標値に追従する目的で構成された制御系で、追従制御、比率制御、プログラム制御がある。
- ①追従制御:自動追尾とも呼ばれ、目標値が時間的に不規則な場合の追値制御
- ②比率制御:基準となるある量に所定の比率を乗じたものが追従すべき目標値となるような制御
- ③プログラム制御:目標値が定められたプログラムに従って変化する場合の制御
制御動力源による分類
- 自力制御:検出・比較の後、補助のエネルギー源なしに制御偏差に伴うパワーにより自力で直接操作部を動かして行われる制御
- 他力制御:制御偏差だけでは操作できないため、操作部を動かすのに必要なエネルギーが補助エネルギーから与えられる制御
コメント(β版)